|
TarzaNN
TarzaNN neural network simulator
|
|
TarzaNN
TarzaNN neural network simulator
|
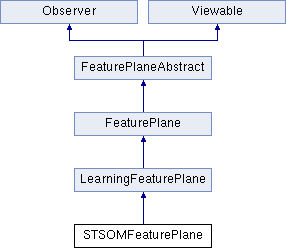
A Topographic Self Organizing map fp, with continuous transformation learning. More...
#include <STSOMFeaturePlane.h>
Public Member Functions | |
| ~STSOMFeaturePlane () | |
| void | read (QDataStream *inStream, QProgressDialog *progress, int *index) |
| void | save (QDataStream *outStream, QProgressDialog *progress, int *index) |
| bool | isLearning () |
| FeaturePlaneInput * | addFilter (Filter *f, FeaturePlaneAbstract *fp, int type, int fpOutputIndex, bool wta) |
| void | incWinCount () |
| int | getWinCount () |
Protected Member Functions | |
| STSOMFeaturePlane (Network *net, int l, QString *name, int w, int h, int angles, int speeds, int alpha, int speed, bool isWTA, bool visible, Neuron *neuron, NotifyStrategyAbstract *notify, bool learning) | |
| void | step () |
| float | nonlinearity (Matrix *totalActivation, OutputImage *workOutput) |
| void | computeGatingUnits () |
| Matrix * | getTotalActivation () |
| bool | hasConverged () |
Friends | |
| class | GatingUnits |
| class | FeaturePlaneFactory |
A Topographic Self Organizing map fp, with continuous transformation learning.
| STSOMFeaturePlane::~STSOMFeaturePlane | ( | ) |
| STSOMFeaturePlane::STSOMFeaturePlane | ( | Network * | net, |
| int | l, | ||
| QString * | name, | ||
| int | w, | ||
| int | h, | ||
| int | angles, | ||
| int | speeds, | ||
| int | alpha, | ||
| int | speed, | ||
| bool | isWTA, | ||
| bool | visible, | ||
| Neuron * | neuron, | ||
| NotifyStrategyAbstract * | notify, | ||
| bool | learning | ||
| ) | [protected] |
Constructor
| net | - network, this FP will be added to the end of the list of feature planes |
| l | - layer index |
| name | - name of the feature plane |
| w | - width |
| h | - height |
| angles | - number of discrete angles (e.g. speeds, orientations) |
| speeds | - number of speeds (e.g. speed bands, scale bands) |
| alpha | - alpha |
| speed | - speed of this fp |
| isWTA | - participates in Selective Tuning |
| visible | - should the FP be presented in the UI |
| neuron | - neuron strategy (what is the output nonlinearity, or the ODE that defines response) |
| notify | - notification strategy (deprecated, on the way out) |
| learning | - are weights adjustable through learning? |
| FeaturePlaneInput * STSOMFeaturePlane::addFilter | ( | Filter * | f, |
| FeaturePlaneAbstract * | fp, | ||
| int | type, | ||
| int | fpOutputIndex, | ||
| bool | wta | ||
| ) | [virtual] |
Add an input filter/feature plane pair.
| f | - filter |
| fp | - input feature plane |
| type | - input type: regular, non-Fourier, masking |
| fpOutputIndex | - in case input feature plane has more than one output, which one are we interested in |
Reimplemented from LearningFeaturePlane.
| void STSOMFeaturePlane::computeGatingUnits | ( | ) | [protected] |
Reimplemented from LearningFeaturePlane.
| Matrix * STSOMFeaturePlane::getTotalActivation | ( | ) | [protected] |
| int STSOMFeaturePlane::getWinCount | ( | ) | [inline] |
| bool STSOMFeaturePlane::hasConverged | ( | ) | [inline, protected] |
| void STSOMFeaturePlane::incWinCount | ( | ) | [inline] |
| bool STSOMFeaturePlane::isLearning | ( | ) |
| float STSOMFeaturePlane::nonlinearity | ( | Matrix * | totalActivation, |
| OutputImage * | workOutput | ||
| ) | [protected] |
| void STSOMFeaturePlane::read | ( | QDataStream * | inStream, |
| QProgressDialog * | progress, | ||
| int * | index | ||
| ) | [virtual] |
Implements LearningFeaturePlane.
| void STSOMFeaturePlane::save | ( | QDataStream * | outStream, |
| QProgressDialog * | progress, | ||
| int * | index | ||
| ) | [virtual] |
Implements LearningFeaturePlane.
| void STSOMFeaturePlane::step | ( | ) | [protected, virtual] |
Do one computation step - compute activations, and FP output
Reimplemented from FeaturePlane.
friend class FeaturePlaneFactory [friend] |
Reimplemented from LearningFeaturePlane.
friend class GatingUnits [friend] |
Reimplemented from LearningFeaturePlane.
 1.7.5.1
1.7.5.1

