|
TarzaNN
TarzaNN neural network simulator
|
|
TarzaNN
TarzaNN neural network simulator
|
#include <FeaturePlaneProxy.h>
Public Member Functions | |
| FeaturePlaneProxy () | |
| FeaturePlaneProxy (Network *net, int l, QString *n, int w, int h, int angles, int speeds, int alpha, int speed, NotifyStrategyAbstract *notify) | |
| FeaturePlaneProxy (Network *net, int l, char *filename) | |
| ~FeaturePlaneProxy () | |
| void | run () |
| Entry point for thread pool invocation. | |
| FeaturePlaneInput * | addFilter (Filter *f, FeaturePlaneAbstract *fp, int type, int fpOutputIndex, bool wta) |
Static Public Member Functions | |
| static int | getType (const QString &name) |
| static QString | getType (int value) |
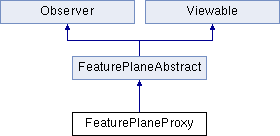
Proxy for a FeaturePlane on a remote computer. This class handles communications between feature planes. Uses the Proxy design pattern
| FeaturePlaneProxy::FeaturePlaneProxy | ( | ) |
| FeaturePlaneProxy::FeaturePlaneProxy | ( | Network * | net, |
| int | l, | ||
| QString * | n, | ||
| int | w, | ||
| int | h, | ||
| int | angles, | ||
| int | speeds, | ||
| int | alpha, | ||
| int | speed, | ||
| NotifyStrategyAbstract * | notify | ||
| ) |
Normal constructor
| FeaturePlaneProxy::FeaturePlaneProxy | ( | Network * | net, |
| int | l, | ||
| char * | filename | ||
| ) |
Proxy of input feature plane, reads in file to get width and height.
| FeaturePlaneProxy::~FeaturePlaneProxy | ( | ) |
| FeaturePlaneInput * FeaturePlaneProxy::addFilter | ( | Filter * | f, |
| FeaturePlaneAbstract * | fp, | ||
| int | type, | ||
| int | fpOutputIndex, | ||
| bool | wta | ||
| ) | [virtual] |
Add an input filter/feature plane pair. In general, do nothing, redefined in FeaturePlane
Reimplemented from FeaturePlaneAbstract.
| static int FeaturePlaneProxy::getType | ( | const QString & | name | ) | [static] |
| static QString FeaturePlaneProxy::getType | ( | int | value | ) | [static] |
Reimplemented from FeaturePlaneAbstract.
| void FeaturePlaneProxy::run | ( | ) |
Entry point for thread pool invocation.
Reimplemented from FeaturePlaneAbstract.
 1.7.5.1
1.7.5.1

