
What is WIDAR?
WIDAR is an acronym for WIreless Detection And Ranging, but yet so much more! It is an Engineering thesis project being
conducted at York University in Ontario, Canada.
The end goal to be completed by our team is the autonomous bridging of a communication gap between two adjacent wireless sensor
networks, which should be acting as one functional system. The nodes being used in this project are the MICA2 provided by
Crossbow Technology Inc.
A project specification report containing a detailed description of the WIDAR project is available along with other documents
pertaining to this topic through the Documents link on the banner above.
The following schematics should give a clear representation of our proposed solution implementation
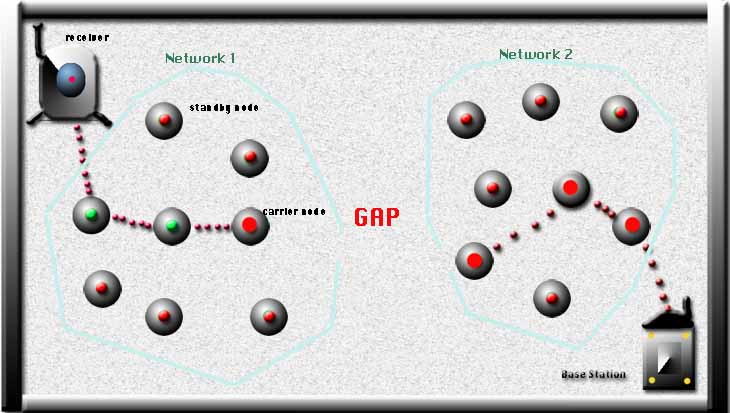
The two node networks are separated by a communicational gap, so no data reaches the base station in the right corner.
The 'green' nodes represent nodes which are currently forwarding data to another node or the base station.
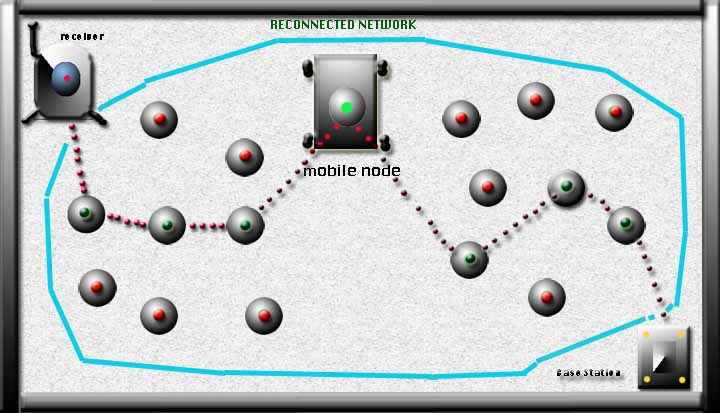
The mobile robot is deployed when the communicational gap is detected by the base station and traverses the vicinity
of the gap until it can reconnect the two sub networks into one fully linked network.
If you wish to contact us at any time, please email XYZwidarXYZ@googlegroups.com. where the XYZ should be removed as
they are only present to avoid any unwanted spam.
|














